|
| | projection_image_camera (const projection_camera &cam, ndsize< 2 > sz) |
| |
| | projection_image_camera (const projection_image_camera &)=default |
| |
| projection_image_camera & | operator= (const projection_image_camera &)=default |
| |
| | projection_camera (const pose &, const projection_view_frustum &, const image_parameters &) |
| |
| | projection_camera (const pose &, const Eigen_mat3 &intrinsic, const depth_projection_parameters &, const ndsize< 2 > &) |
| |
| | projection_camera (const projection_camera &)=default |
| |
| projection_camera & | operator= (const projection_camera &)=default |
| |
| const projection_view_frustum & | relative_frustum () const |
| |
| const depth_projection_parameters & | depth_parameters () const |
| |
| image_coordinates_type | project (const Eigen_vec3 &p) const override |
| | Project point p to image coordinates. More...
|
| |
| real | depth (const Eigen_vec3 &p) const override |
| |
| Eigen_vec3 | ray_direction (const image_coordinates_type &c) const override |
| | Direction vector of ray pointing to point corresponding to image coordinates c. More...
|
| |
| Eigen_vec3 | point (const image_coordinates_type &c, real depth) const override |
| |
| virtual real | depth (const spherical_coordinates &sp) const |
| |
| | camera (const camera &)=default |
| |
| camera & | operator= (const camera &)=default |
| |
| virtual | ~camera ()=default |
| |
| Eigen_affine3 | view_transformation () const |
| | Extrinsic parameters of camera. More...
|
| |
| Eigen_vec3 | center_ray_direction () const |
| | Direction vector of ray -Z pointing straight out camera. More...
|
| |
| Eigen_vec3 | ray_direction (const spherical_coordinates &sp) const |
| | Direction vector of ray pointing to point with spherical coordinates sp. More...
|
| |
| Eigen_vec3 | ray_direction (const Eigen_vec3 &p) const |
| | Direction vector of ray pointing to point p. More...
|
| |
| float | distance_sq (const Eigen_vec3 &p) const |
| | Squared distance of 3D point p to camera center. More...
|
| |
| float | distance (const Eigen_vec3 &p) const |
| | Distance of 3D point p to camera center. More...
|
| |
| spherical_coordinates | to_spherical (const Eigen_vec3 &p) const |
| | Convert 3D point cartesian coordinates p to spherical. More...
|
| |
| Eigen_vec3 | point (const spherical_coordinates &sp) const |
| | Convert 3D point spherical coordinates sp to cartesian. More...
|
| |
| virtual image_coordinates_type | project (const spherical_coordinates &sp) const |
| | Project point with spherical coordinates sp to image coordinates. More...
|
| |
| | space_object (const pose &=pose()) |
| |
| | space_object (const pose &, space_object &par) |
| |
| | space_object (const space_object &) |
| |
| space_object & | operator= (const space_object &) |
| |
| virtual | ~space_object () |
| |
| bool | has_parent_space_object () const |
| |
| const space_object & | parent_space_object () const |
| |
| space_object & | parent_space_object () |
| |
| const pose & | relative_pose () const |
| |
| pose | absolute_pose () const |
| |
| void | set_relative_pose (const pose &) |
| |
| void | set_no_relative_pose () |
| |
| Eigen_affine3 | transformation_from (const space_object &) const |
| |
| Eigen_affine3 | transformation_to (const space_object &) const |
| |
| void | set_parent (space_object &, const pose &new_relative_pose=pose()) |
| |
| void | set_no_parent (const pose &new_pose=pose()) |
| |
| void | make_sibling (const space_object &, const pose &new_pose=pose()) |
| |
| template<typename Transformation > |
| void | transform (const Transformation &t) |
| |
| template<typename Transformation > |
| void | transform (const Transformation &rt, const space_object &relative_to) |
| |
| void | move (const Eigen_vec3 &t) |
| |
| void | move (float x, float y, float z) |
| |
| void | move_x (float x) |
| |
| void | move_y (float y) |
| |
| void | move_z (float z) |
| |
| void | rotate_x_axis (angle a, const Eigen_vec3 &c=Eigen_vec3::Zero()) |
| |
| void | rotate_y_axis (angle a, const Eigen_vec3 &c=Eigen_vec3::Zero()) |
| |
| void | rotate_z_axis (angle a, const Eigen_vec3 &c=Eigen_vec3::Zero()) |
| |
| void | look_at (const space_object &) |
| |
| virtual bounding_box | box () const |
| |
| | depth_image_camera ()=default |
| |
| | depth_image_camera (const ndsize< 2 > &image_size, real origin, real range) |
| |
| bool | in_depth_bounds (real d) const |
| | Verifies whether d is in bounds of valid depth values. More...
|
| |
| pixel_depth_type | to_pixel_depth (real d) const |
| | Map depth value to pixel depth value. More...
|
| |
| pixel_depth_type | to_pixel_depth_clamp (real d) const |
| | Map depth value to pixel depth value, and clamp to bounds. More...
|
| |
| real | to_depth (pixel_depth_type pixd) const |
| | Map pixel depth value to depth value in range defined by depth projection parameter. More...
|
| |
| | image_camera (const image_camera &)=default |
| |
| real | image_aspect_ratio () const |
| |
| const ndsize< 2 > & | image_size () const |
| |
| std::size_t | image_number_of_pixels () const |
| |
| bool | pixel_coordinates_flipped () const |
| |
| void | flip_pixel_coordinates () |
| |
| void | set_image_width (std::size_t) |
| | Set image width, and adjust height to keep same aspect ratio. More...
|
| |
| void | set_image_height (std::size_t) |
| | Set image height, and adjust width to keep same aspect ratio. More...
|
| |
| ndspan< 2 > | image_span () const |
| |
| image_coordinates_type | to_image (pixel_coordinates_type pix) const |
| |
| pixel_coordinates_type | to_pixel (image_coordinates_type im) const |
| |
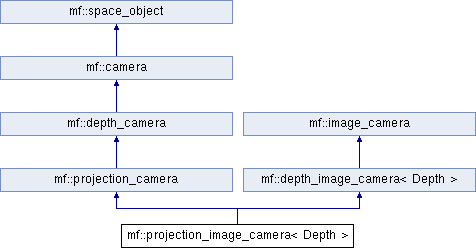
template<typename Depth>
class mf::projection_image_camera< Depth >
Pin-hole camera with mapping onto image pixel coordinates.
 Public Member Functions inherited from mf::projection_camera
Public Member Functions inherited from mf::projection_camera 1.8.6
1.8.6

